 技术参数
技术参数 产品详情
产品详情 资料下载
资料下载 视频
视频 相关产品
相关产品







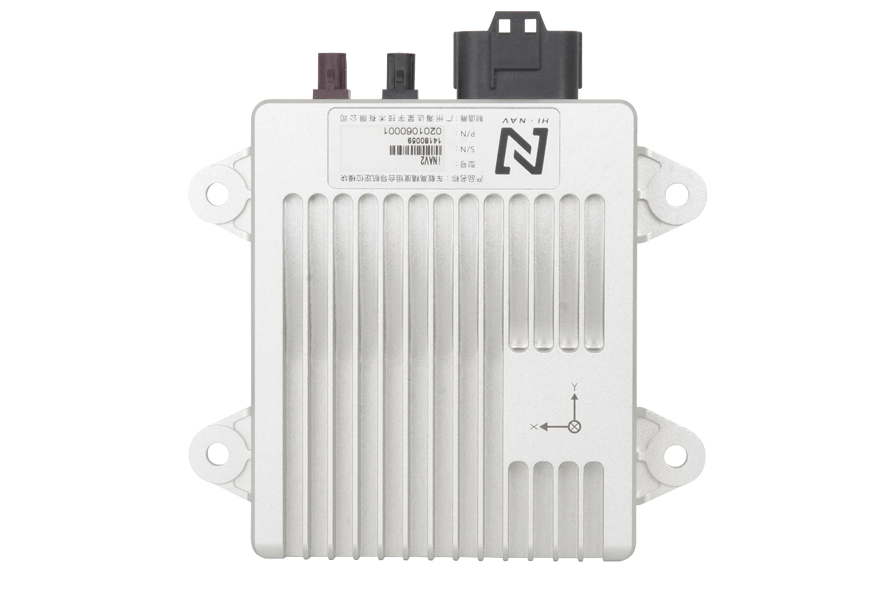
iNAV2 车载高精度组合导航模块
iNAV2
车载高精度组合导航模块
iNav2是一款高精度、小体积、高可靠性的组合导航模块。采用自主多传感器紧耦合算法,能够在城市峡谷、林荫道等恶劣环境下有效提高固定率,并提供更为可靠的导航精度。同时双天线定向的设计可以在低速/静态的场景下快速的完成初始化。



多频点
独特的边界控制算法
多星座优选策略
多通道数
丰富的接口协议

资料下载
设备参数
| iNAV2车载紧组合定位模块 | ||||||||
| 性能参数 | iNAV2 | |||||||
| GNSS指标 | 卫星系统 | BDS:B1、B2 | ||||||
| GLONASS:G1、G2 | ||||||||
| GPS:L1、L2 | ||||||||
| GALILEO:E1、E5B | ||||||||
| GNSS数据更新率 | 5Hz、10Hz | |||||||
| 航向精度 | 0.2°/m | |||||||
| 组合导航数据更新率 | 100Hz | |||||||
| 环境指标 | 工作温度 | -40℃~+65℃ | ||||||
| 储存温度 | -50℃~+80℃ | |||||||
| 湿度 | 95%无冷凝 | |||||||
| 振动 | MIL-STD-810G(40g) | |||||||
| 防护等级 | IP55 | |||||||
| 物理尺寸和电气特性 | 尺寸 | 120x100x35mm | ||||||
| 重量 | 420g | |||||||
| 输入电压 | 9~28V | |||||||
| 功耗 | <5W | |||||||
| IMU性能指标 | 陀螺类型 | MEMS | ||||||
| 陀螺输入范围 | ±500°/s | |||||||
| 陀螺零偏稳定性 | 2.5°/hr | |||||||
| 加速度计量程 | ±8g | |||||||
| 加速度计零偏稳定性 | 1mg | |||||||
| 组合导航系统性能(未融合轮速) | ||||||||
| 中断时间0s | 定位模式 | 位置精度(m)RMS | 速度精度(m/s)RMS | 测姿精度(度)RMS | ||||
| 水平 | 垂直 | 水平 | 垂直 | 横滚 | 俯仰 | 方位 | ||
| 实时RTK | 0.02 | 0.03 | 0.02 | 0.01 | 0.08 | 0.08 | 0.15 | |
| 后处理 | 0.01 | 0.02 | 0.02 | 0.01 | 0.05 | 0.05 | 0.1 | |
| 中断时间10s | 定位模式 | 位置精度(m)RMS | 速度精度(m/s)RMS | 测姿精度(度)RMS | ||||
| 水平 | 垂直 | 水平 | 垂直 | 横滚 | 俯仰 | 方位 | ||
| 实时RTK | 0.3 | 0.2 | 0.051 | 0.017 | 0.025 | 0.025 | 0.095 | |
| 后处理 | 0.03 | 0.05 | 0.03 | 0.02 | 0.05 | 0.05 | 0.12 | |
| 中断时间60s | 定位模式 | 位置精度(m)RMS | 速度精度(m/s)RMS | 测姿精度(度)RMS | ||||
| 水平 | 垂直 | 水平 | 垂直 | 横滚 | 俯仰 | 方位 | ||
| 实时RTK | 4 | 3 | 0.3 | 0.15 | 0.2 | 0.2 | 0.33 | |
| 后处理 | 0.7 | 0.2 | 0.04 | 0.03 | 0.1 | 0.1 | 0.15 | |






 顶部
顶部