








该地质灾害点位于广州某国道南侧边坡,测区面积约0.4平方公里,测区类型为林地,落差约120米。业主要求输出LAS格式激光点云数据、分类后地面点云数据、测区数字高程模型及正射影像。
项目地处华南丘陵山地地带,植被繁茂,地质条件复杂,采用传统的RTK、全站仪测量,作业难度大,精度难以保障,同时复杂的作业环境会对测量人员的安全造成威胁。
针对地形特点和业主方成果要求,采用龙腾L120多旋翼无人机搭载PM-1500机载激光测量系统进行边坡应急地形测量。 本次项目飞行单架次,飞行时间为15分28秒,覆盖测区0.4平方公里,后期成果输出仅用10分钟,所获成果满足业主要求。

前期准备
首先,需要详细了解边坡的地形地貌特征,包括坡度、植被覆盖、可能存在的障碍物等。根据上述信息,制定合适的飞行计划和测量方案。同时,确保机载激光测量系统处于良好的工作状态,包括检查激光扫描仪、定位设备、数据处理系统等是否正常运行。

现场勘查与布点
在边坡现场进行勘查,确定测量区域的范围和精度要求。根据勘查结果,在边坡上合理布设测量控制点和目标点,以便后续的数据采集和处理。
飞行数据采集
启动机载激光测量系统,按照飞行计划进行数据采集。在飞行过程中,激光扫描仪会向地面发射激光脉冲,并记录反射回来的时间。以上数据将用于计算地形的三维坐标。

数据预处理
采集完数据后,需要进行系列预处理操作,包括滤波、去噪、坐标转换等,旨在提高数据的准确性和可靠性,为后续的地形分析提供保障。
地形建模与分析
利用预处理后的数据,构建边坡的三维地形模型。在此基础上,可以进行地形分析,包括坡度、坡向、高程变化等参数的提取和计算。所得分析结果可以用于评估边坡的稳定性,识别潜在的风险区域。

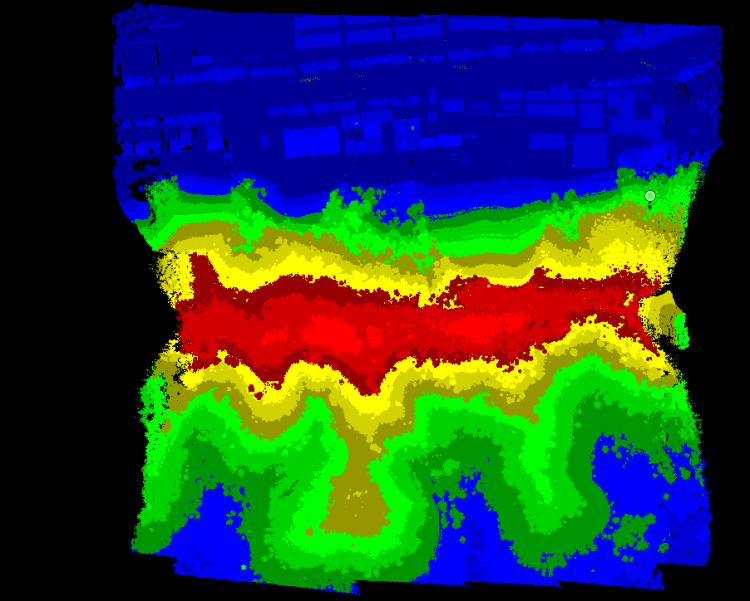
PM-1500机载激光测量系统,最高可达7次回波,针对当地植被茂密地形,有效辅助数据滤波,通过区分不同层次的回波信号,可以更好地识别并剔除噪声和异常值,提高点云数据的质量。从成果中可以看出,利用三维激光多回波的技术优势,可以更准确地提取出地面的高程信息,数据成果高效率的处理,也保障了高精度。
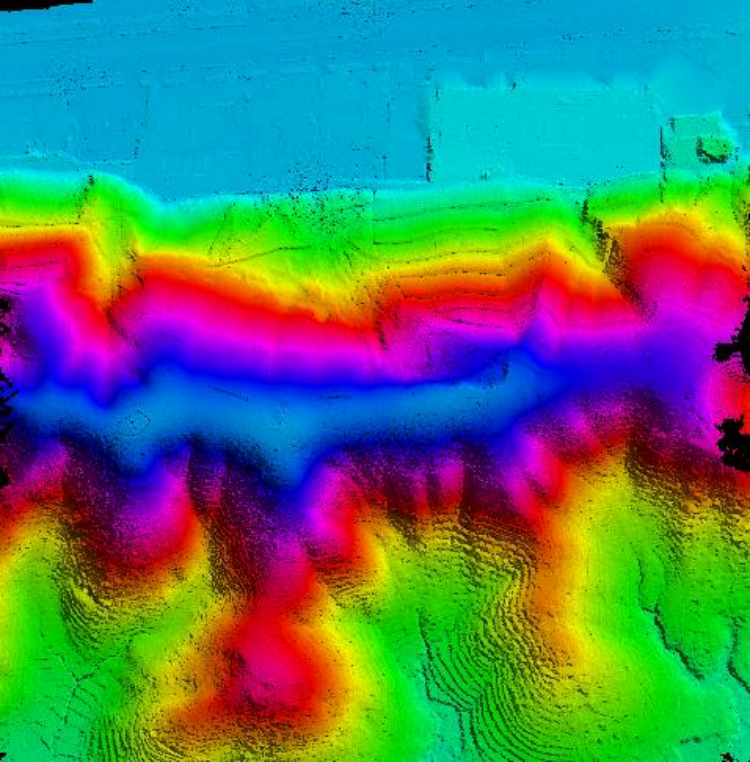
整体点云效果—“高程赋色”
点云密度—高植被区域(881个/平方米)

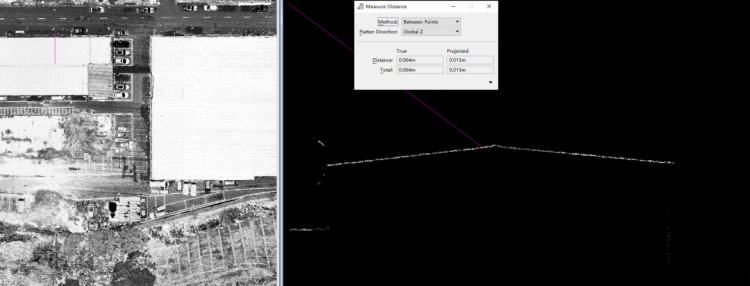
点云厚度—房屋部分(0.064米)
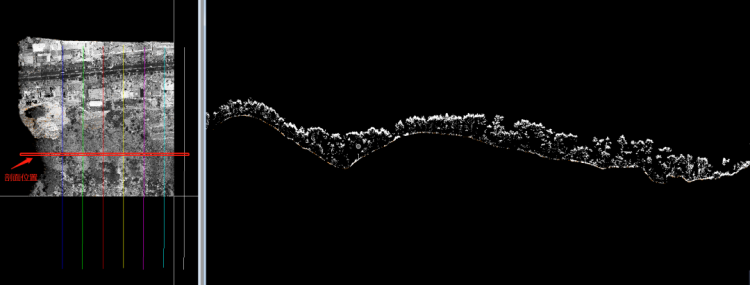
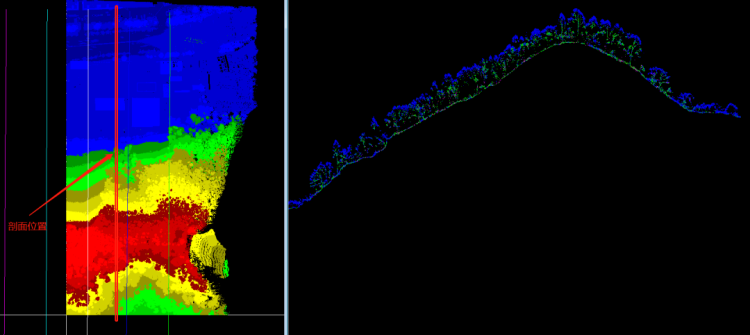
点云穿透性效果展示—剖面
DEM—灰度图
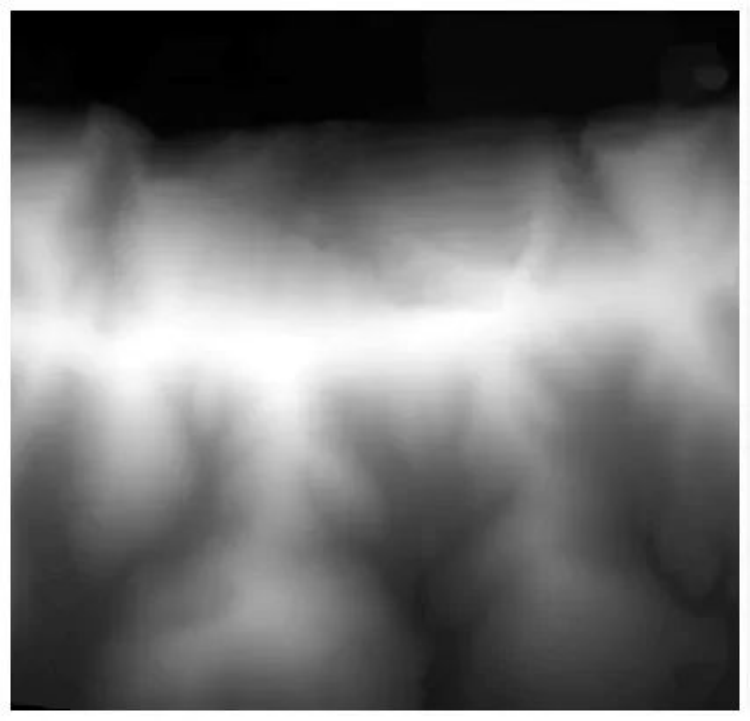
(坐标及高程均可量取)
DEM—整体效果图
点云回波效果—剖面
点云精度报告
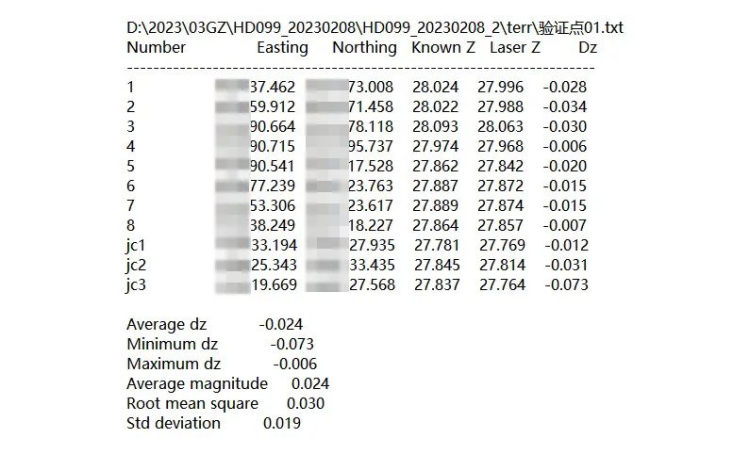
高程精度:0.03米
针对边坡应急地形测量,在地形地貌复杂、自然环境恶劣、环境敏感区域,使用常规测量手段,测绘速度慢、成本高、效率低、受自然和地理条件制约大,而无人机搭载激光雷达测量系统具有机动灵活、使用便捷、维护简单等特点,可以快速有效获取高精度的地形数据,能轻松应对边坡应急地形测量带来的挑战。






 顶部
顶部